6 U-splines: Tutorial
6.1 Building intuition: Constraints
The following exercises introduce basic concepts behind continuity constraints, described in detail in Continuity Constraints, Interface Continuity Constraints in Two Dimensions.
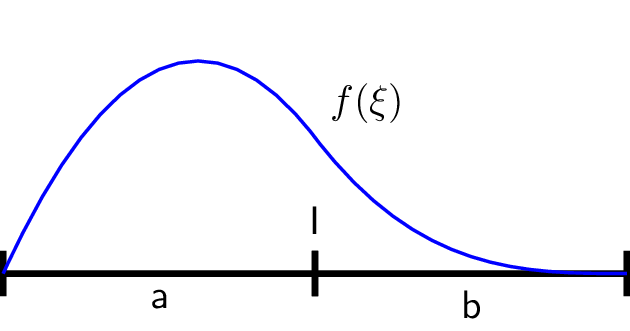
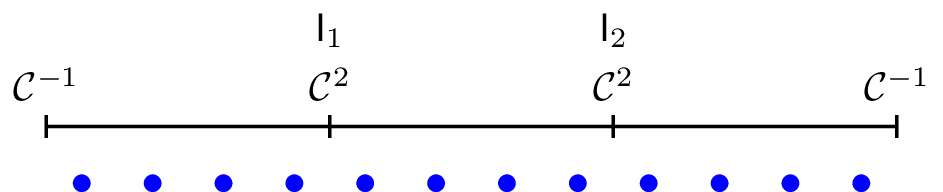
Consider two -cells and on a one-dimensional mesh, separated by interface as shown in figure 81. Each cell is assigned a parameterization with parent coordinate running from left to right. The length of the parametric domain on cell is , and the length of the parametric domain on cell is . The mapping from the parent to the parametric domain on each cell is The degree assigned to cell is , and the degree assigned to cell is . Derive the continuity constraint on the th derivative across interface in homogeneous Bernstein form.
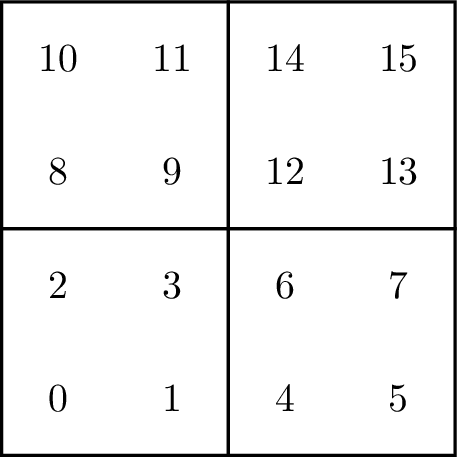
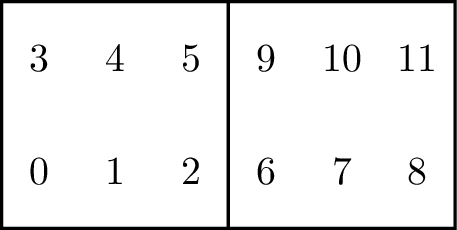
A four-element Bézier mesh with a bilinear basis is shown in figure 82. Use the provided function indexing to determine the constraint matrices for all four internal interfaces and the global constraint matrix. The interface is the bottom interface and the remaining interfaces are ordered in a counterclockwise fashion. What is the rank of the global constraint matrix?
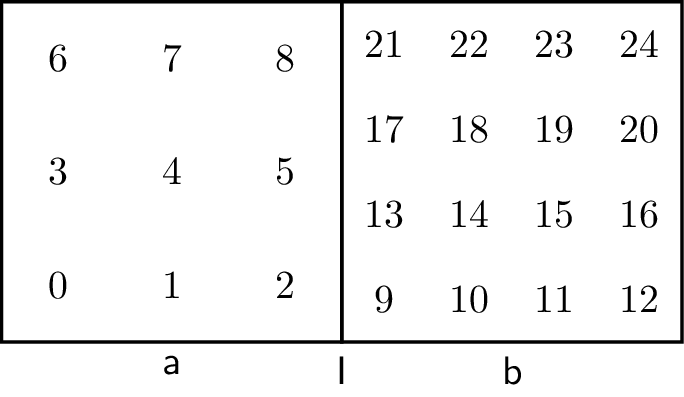
Determine the constraint matrix for the Bézier mesh shown in figure 83.
6.2 Building intuition: Splines
The following exercises introduce basic concepts behind splines, spline bases, and the associated nullspace problem. These concepts were described in detail in Splines and the Nullspace Problem.
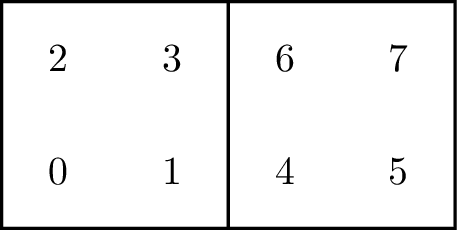
Consider the two element Bézier mesh consisting of linear cells and a constraint assigned to the interface between them as shown in figure 84. Solve for the basis vectors of the nullspace.

Consider the two element Bézier mesh shown in figure 85. Compute the constraint matrix and verify that one possible basis for the nullspace of is given by the basis vectors

6.3 Building intuition: Basis vectors
The following exercises introduce basic concepts behind basis vectors for -cell nullspaces and the related rank one nullspace problem. These concepts were described in detail in Basis vectors for cell nullspaces.
Observe that the three interior basis vectors with multiple nonzero coefficients, shown in equation , all have four nonzero entries and that these same coefficients can be obtained by solving the three reduced problems where the reduced smoothness constraint matrices are Each of these matrices has rank three which means that it has a rank one nullspace. These problems do not have unique solutions. One way to obtain a positive solution to these problems is to augment the constraint matrix so that one of the values is constrained to be one. Carry this procedure out for each of the reduced matrices and solve for the resulting vectors.
Why is the augmentation procedure, where one additional equation is added that has exactly one nonzero entry, sufficient to solve a rank one nullspace problem?
Describe the geometry of a rank one nullspace problem where the dimension of the constraint space is and the dimension of the Bernstein space is . Graphically convey these ideas for the rank one nullspace of the basis vector on the interface of the linear mesh given in question 4 in Building intuition: Splines.
Write down the constraint matrix for the system of cells shown in figure 86 and draw the nonzero entries for each constraint.
Determine the constraint matrix and the index sets for the basis vectors for the quadratic-linear two cell example with a interface shown in figure 87.
Determine the basis vectors with more than one nonzero entry for each interface constraint matrix in equation , equation , equation , equation corresponding to the interfaces in figure 82, and draw a picture highlighting the nonzero entries for each vector.
6.4 Building intuition: The U-spline mesh
A U-spline mesh is a Bézier mesh which conforms to a set of admissibility conditions, as described in The U-spline Mesh. These admissibility conditions rely on a concept called a ribbon. The following exercise introduces the basic ideas behind the construction of a ribbon.
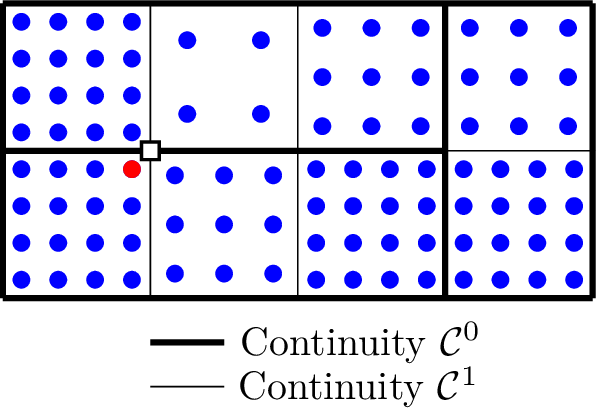
Construct a ribbon of maximum coupling length on the mesh in figure 88, originating at the red Bernstein index near the vertex labeled with a small hollow square and proceeding to the right. Determine whether the ribbon is truncated.
6.5 Building intuition: The U-spline basis
The following exercises introduce basic concepts that are utilized in the algorithm for constructing a U-spline basis, described in detail in The U-spline basis.
The constraint systems of two interfaces and are said to interact if the product of the matrices of absolute values has nonzero entries. Let and then the constraints associated with and interact if there exists at least one entry in the matrix that is greater than zero. Determine the constraint matrices for the two interfaces and and for the U-spline mesh shown in figure 89.
We showed that the number of nonzero contiguous Bernstein coefficients required for a basis vector on an interface in the univariate case can be determined from the continuity of the interface, specifically . Restricting the constraint system to the coefficients that are known to be nonzero results in a rank one system. Consider all the contiguous index sets of size from interface and in figure 89. Consider all pairings of these sets where one comes from and the other comes from such that the combined index set is contiguous. Construct the matrices corresponding to these sets of nonzero coefficients and determine the rank of the nullspace for each one.